
摘 要:本文以 Buck 变换器作为光伏模拟器功率电路拓扑,采用双极点双零点补偿网络对 Buck 变换器电流环进行补偿设计,并分析了该设计的不足;之后使用滞环电流控制作为控制策略,分析了滞环电流控制在该应用中的优越性;最后使用半实物仿真平台 Rt-lab 进行硬件在环实验,利用 Dsp2808 进行编程控制,验证了理论的正确性,该研究具有一定的理论价值和实用价值。
关键词:光伏模拟器,Buck,双极点双零点补偿网络,滞环电流控制,Rt-lab
1.引言
光伏能源作为可再生能源的重要组成部分,以其环保,安全,低成本的特点而成为当前研究热点[1]。然而在实验中若直接使用太阳能电池阵列,不仅成本高,而且需要根据不同的要求制造出相应的光照条件和温度条件,以使太阳能电池阵列输出特性曲线发生改变,这就使得实验周期延长,实验成本进一步提高。若使用太阳能阵列模拟器模拟真实的太阳能电池阵列,就可以在实验室条件下,根据不同的温度条件和光照条件要求,光伏模拟器输出相应的I-V特性曲线,达到模拟太阳能电池阵列的目的。数字式光伏电池模拟器在国外己有一定的研究,并有一些样机和装置问世。文献[2]中的光伏模拟器虽不受环境影响,但其输出特性受外电路的影响严重,无法满足负载变动范围较大情况下输出特性要求。国外光伏发电技术较为成熟, 其光伏模拟器已应用于光伏逆变器等光伏系统中。而国内光伏发电技术相对落后,起步很晚,尚处于实验室阶段。目前,国内数字光伏模拟器主要是由微处理器如单片机或Dsp完成控制部分, 而对于主电路尤其是斩波电路采用的是较为成熟可靠的Pwm控制方法,如全桥变换器,降压变换器等等。中国科学院电工所利用Dsp2407设计的光伏模拟器, 基本实现了预期的功能,但是具有一定的局限性。例如在负载较小的区域有较大的纹波,当负载由较大值突变为较小值时,存在电流会突变,调节时间长,模拟范围窄等问题。本文提出的Buck型光伏模拟器,采用两种不同的控制方法进行控制, 分别从理论上分析了两种方法的优缺点,最后进行硬件在环实验,将二者的实验结果进行对比分析,验证了理论的正确性。
2.光伏模拟器拓扑和I-V特性曲线的确定方法
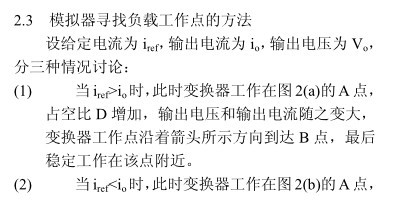
2.1 光伏模拟器 I-V 特性曲线的确定方法
目前常用的特性曲线确定方法主要有三种:根据数学模型直接得到特性曲线法,利用折线拟合光伏特性曲线法和查表法。 使用数学模型直接得到特性曲线,由于数学模型本身的函数是隐式函数,虽然精确但求解需要复杂的迭代数值计算, 占用控制器的大量时间,导致控制延迟,对于系统性能的不利影响很大;采用折线模拟特性曲线,避免了复杂的数学运算,计算量上大大简化,但是所得折线精确度不高,影响模拟器的精度。本文采用查表法来确定输出特性曲线,该法具有灵活、计算量小、精确度高等特点。
2.2 光伏模拟器功率电路拓扑选择
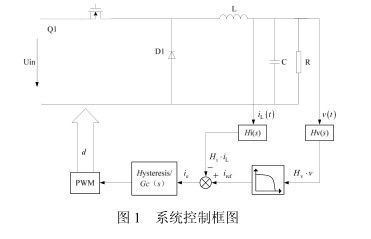
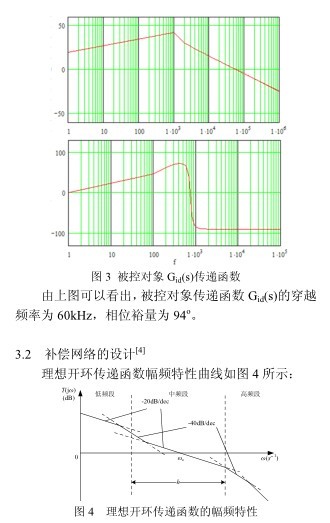
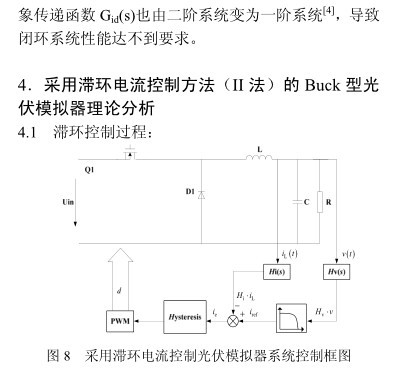
本文主要目的是验证不同控制方法应用于光伏模拟器上的合理性,所设计模拟器功率较小,适用于功率要求较小的场合。 故选择 Buck 型变换器作为功率电路拓扑,其具有结构简单,控制方便,输出电流、输出电压脉动小等特点。系统控制框图如图 1 所示:
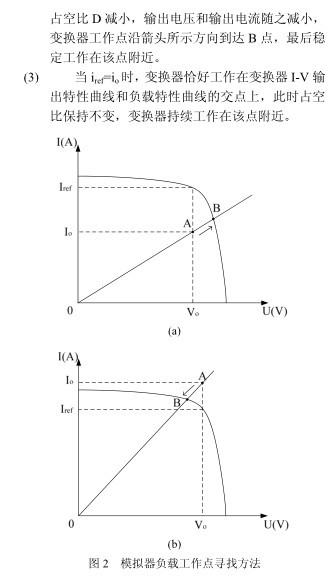

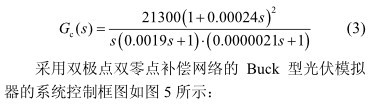
在补偿环节中加入一个积分环节使系统开环传递函数的稳态误差符合要求;在低频处加入一个极点,对控制对象传递函数的低频零点进行抵消;加入一个双重零点以抵消控制对象传递函数的双重极点;并在高频处加入一个极点起高频滤波作用,这里没有考虑电容的寄生电阻, 所以将该极点设置在开关频率附近,以加大高频分量的衰减速度;通过调节比例 K 的值选择适当的穿越频率,以提高系统的响应速度。选择双极点双零点补偿网络:
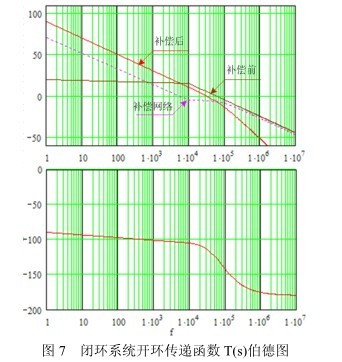
从图中可以看出:补偿后的闭环控制系统开环传递函数 T(s)的穿越频率为 30kHz, 相位裕量为 66.775o,满足稳定性和快速性要求。然而,变换器控制系统补偿网络是在变化器输出功率最大值处进行设计的,当负载变动范围大时, 被控对象传递函数 Gid(s)和闭环系统开环传递函数 T(s)幅频特性曲线和相频特性曲线都会发生较大变动,造成闭环系统动态性能和稳态性能变差,甚至导致闭环系统不稳定,尤其是变换器轻载时,Buck 变换器电感电流进入断续工作模式,被控对象传递函数 Gid(s)也由二阶系统变为一阶系统[4],导致闭环系统性能达不到要求。

5.实验
5.1 硬件在环实验控制框图
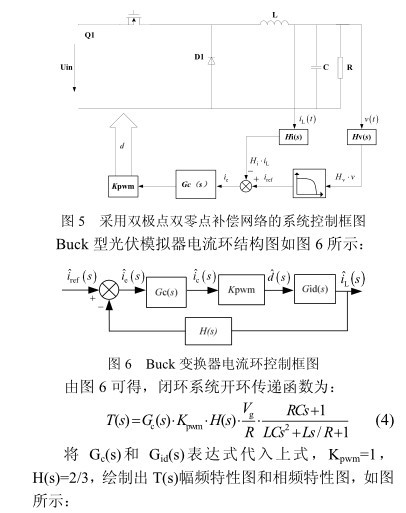
采用 Rt-lab 进行硬件在环实验, 利用 TI 公司生产的 TMS320F2808 进行编程控制,如图 10 所示:
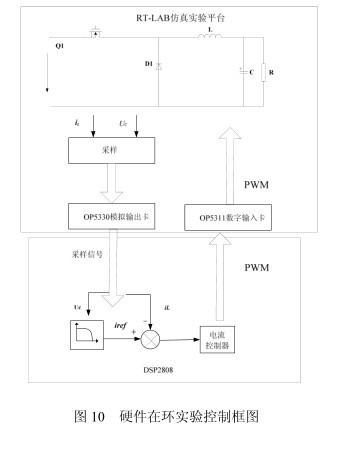
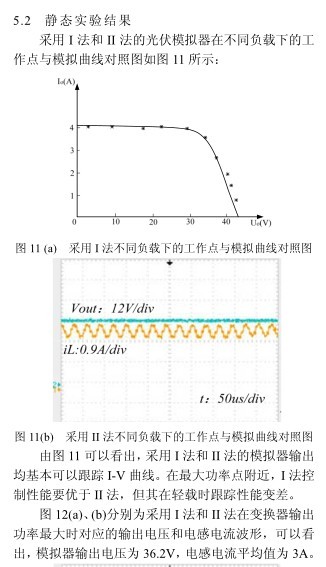

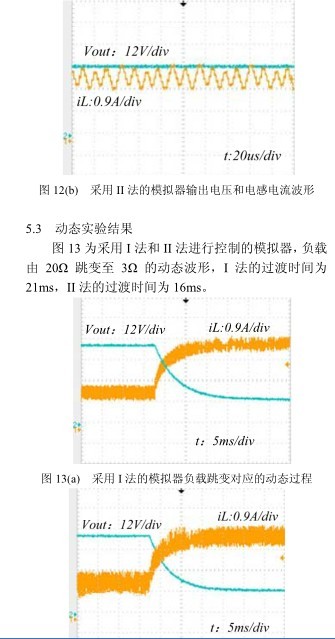
图 13(b) 采用 II 法的模拟器负载跳变对应的动态过程
Rt-lab 自身采样周期为 3μs, 这就导致实验波形中电感电流呈阶梯状上升下降,阶梯的宽度为 3μs/格。由于程序控制和 Rt-lab 自身存在延迟,使得电感电流纹波和理论值相比偏大。从以上实验结果对比中可以看出,采用 I 法的模拟器在最大功率点处稳定工作时电感电流纹波小于采用 II 法进行控制的模拟器,输出电压纹波也较小。但其在负载发生突变时其响应速度略慢于采用 II 法进行控制的光伏模拟器。综上所述,采用I法的Buck型光伏模拟器的静态性能要优于采用II 法的 Buck 型光伏模拟器,但动态性能略差。
6.结论
本文从拓扑结构、控制策略等方面提出了光伏模拟器实现方法,利用半实物仿真平台对设计进行了验证,将采用两种不同控制方法的模拟器实验波形进行对比,分析了两种控制策略的优劣,具有一定的理论价值和实用价值。
参考文献
[1] 王革华. 新能源概论. 北京: 化学工业出版社, 2006. 8.
[2] Hiroshi Nagayoshi', Shinji Orio, Yuji Kono, etal. Novel
PV array module I-V curve simulator circuit. Photovoltaic
Specialists Conference, 535-1538, 2002.
[3] Robert, W. Erickson, Dragan, Maksimovic. Fundamentals
of power electronics[M]. Second Edition, Kluwer
Academic Publishers Group, 2001.
[4] 张卫平. 开关变换器的建模及控制. 北京: 中国电力出
版社, 2006. 1.
[5] Jungmoon Kim, Hyunho Chu, and Chulwoo Kim,
Current-mode DC-DC Buck Converter with Reliable
Hysteretic-Mode Control and Dual Modulator for Fast
Dynamic Voltage Scaling,IEEE J. Solid-State Circuits,
vol. 42, II, pp. 2451-2465, Nov. 2007
作者简介:
黄河(1988-) ,男,山东人,硕士研究生,研究
方向逆变器可靠性分析。





